Bluefin-21 Unmanned Underwater Vehicle (UUV)

The Bluefin®-21 is a highly modular autonomous Unmanned Underwater Vehicle (UUV) able to carry multiple sensors and payloads at once. It boasts a high energy capacity that enables extended operations even at the greatest depths. The Bluefin-21 has immense capability but is also flexible enough to operate from various ships of opportunity worldwide. The Bluefin-21 is ideal for a variety of applications, including:
- Search and Salvage
- Archaeology and Exploration
- Oceanography
- Mine Countermeasures (MCM)
- Unexploded Ordnance (UXO)






News: U.S. NAVY DEPLOYS AUTONOMOUS BLUEFIN-21 UUV UNDER THE ICE
During the U.S. Navy's recent biennial Ice Exercise (ICEX 2020), General Dynamics partnered with MIT to put the Bluefin-21 Macrura UUV to the test under the ice in the Arctic Circle.
Features
Free-Flooded Modularity
The vehicle design includes swappable payload sections and battery modules for in-field mission reconfiguration. Subsystems can be quickly accessed for rapid turnaround between missions and also allow for in-field maintenance, accelerating operational tempo.
Efficient Workhorse
The Bluefin-21 is an efficient, deep-rated UUV able to execute surveys with demanding requirements typically addressed by larger, more cumbersome platforms. Its small size and ability to be launched and recovered from a simple A-frame or docking head allow it to take advantage of ships of opportunity.
Accurate Navigation
The Bluefin-21 uses an INS to provide the best possible navigation accuracy. Dead reckoning drift is typically less than 0.1% of distance traveled, yielding higher quality data. USBL aiding further improves navigation accuracy.
Air-Shippable
The vehicle, batteries and support equipment can be broken down and packaged into easily transportable sections, making the system ideal for time-critical and remote operations.
Specifications
Technical Specifications |
View Datasheet |
| Diameter | 21 in (53 cm) |
| Length | 16.2 ft (493 cm) |
| Weight (Dry) | 1,650 lb (750 kg) |
| Buoyancy | ~ 16 lb (7.3 kg) net positive |
| Lift Points | 1 (located mid-vehicle) |
| Depth Rating | 14,763 ft (4,500 m) |
| Endurance | 25 hours @ 3 knots with standard payload |
| Speed | Up to 4.5 knots |
| Energy | 13.5 kWh of total energy Nine 1.5 kWh battery packs Lithium-polymer, pressure-tolerant |
| Propulsion | Gimbaled, ducted thruster for propulsion and control |
| Navigation | Real-time accuracy ≤ 0.1% of D.T. CEP 50 INS, DVL, SVS and GPS USBL tracking with vehicle position updates |
| Antenna | Integrated — GPS, RF, Iridium and strobe |
| Communications | RF, Iridium and acoustic; Ethernet via shore power cable |
| Safety Systems | Fault and leak detection, dropweight, acoustic tracking transponder, strobe, RDF and Iridium (all independently powered) |
| Software | GUI-based Operator Tool Suite |
| Data Management | 4 GB flash drive for vehicle data Plus additional payload storage |
| Standard Payloads (others available) |
EdgeTech 2200-M 120/410 kHz side scan sonar (option: EdgeTech 230/850 kHz dynamically focused) EdgeTech DW-216 sub-bottom profiler Reson 7125 400 kHz multibeam echosounder |
Operator Tool Suite
Our Operator Tool Suite is a comprehensive UUV software package that provides the interface between the UUV and the operator for all mission phases. The simple user interface maximizes the operator’s effectiveness in UUV operations. This Windows-based tool suite includes everything necessary to run and manage the system, including vehicle check-out and testing, mission planning, vehicle communications, mission monitoring and execution, data management, and post-mission analysis.
Mission Planner
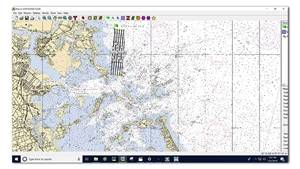
From within this graphical tool, basic missions are easy to enter and verify, while complex mission plans can be built up from basic survey “widgets.” Mission and safety details are fully accessible, allowing for rapid and accurate mission planning. Planning takes place on top of a chart-based view which accepts raster or digital charts. Operators can specify safety settings, operational constraints, recovery points and return plans. The Mission Planner also allows customer-specific commands to be sent via the Standard Payload Interface.
Dashboard

Dashboard tools enable the operator to track vehicles against a chart-based interface which includes ship position indicators, mission plans, and a variety of operator-specified annotations. Vehicle status is readily apparent, including the current behavior as well as details of vehicle status. The Dashboard automatically shifts communications to the highest bandwidth channel available providing you with a dynamic gateway to the vehicle. A variety of specialized diagnostic interfaces aid the preventative and corrective maintenance procedures for each sensor and subsystem.
TOPICS
Communications Infrastructure
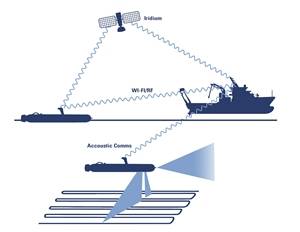
- Iridium over-the-horizon communications
- Acoustic communications while on the surface
Bluefin TOPICS reports detailed mission status while on a dive, including the status of the vehicle’s subsystems, payload health and data collected. Vehicle position is also plotted on the Bluefin Dashboard chart.
Witness
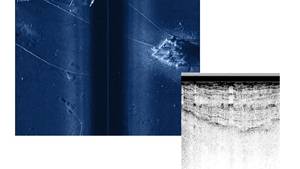
Witness is an end-to-end solution for transferring clips of imagery to operators via Bluefin TOPICS while underwater and underway. Bluefin Witness allows operators to:
- Verify payload data quality
- Identify objects of interest while underway
- Better inform decision making
Bluefin Witness processes payload data in real time onboard the UUV, compresses the imagery and sends it to operators via the acoustic communication link throughout a mission.
Video Demonstrations
Watch our Bluefin-21 UUV in action during U.S. Navy exercises.

ICEX 2020: BLUEFIN-21 UUV NAVIGATES AUTONOMOUSLY UNDER THE ARCTIC CIRCLE
When submerged under the ice, underwater vehicles cannot rely on GPS signals for navigation. To overcome this challenge, General Dynamics partnered with MIT during the U.S. Navy's biennial Ice Exercise (ICEX 2020) to test the Bluefin-21 Unmanned Underwater Vehicle (UUV) under the ice at the Arctic Circle.
Using a new integrated acoustic communication system, a Bluefin-21 named Macrura navigated autonomously under a six-foot-thick sheet of ice. This new communication and navigation system was developed by MIT's team at the Laboratory For Autonomous Marine Sensing Systems.

ANTX 2018: THEATRE-LEVEL PLANNING COMMAND CENTER & BLUEFIN-21 DEMO
This demonstration provided technology solutions to the challenges of communicating among multiple platforms in contested underwater environments. It took place at the U.S. Naval Undersea Warfare Center (NUWC) in Newport, Rhode Island, as part of the Advanced Naval Technology Exercise (ANTX) 2018.
The General Dynamics team leveraged “big picture” theatre-level planning tools to enable cross-domain C3 of manned submarines and UUV systems. The demonstration employed real-time mission communications with a land-based, theatre-level planning command center and a submarine’s tactical-level command center responsible for tasking the Bluefin-21 and NUWC-owned UUV mission assets.

ANTX 2017: BLUEFIN-21 LAUNCHING SMALLER UUVS DEMO
General Dynamics demonstrated multiple mission command, control and communication capabilities connecting a Bluefin-21 UUV and a third-party provided unmanned aerial vehicle (UAV) with a simulated AN/BYG-1 submarine combat control center ashore.
The goal of the General Dynamics demonstrations was to provide available solutions to the communications challenges of operating in a contested, undersea environment. This demonstration took place at the U.S. Naval Undersea Warfare Center (NUWC) in Newport, Rhode Island, as part of the Advanced Naval Technology Exercise (ANTX) 2017.
News
Video: Bluefin-21 UUV Navigates Autonomously Under The Arctic Circle
January 19, 2022
When submerged under the ice, underwater vehicles cannot rely on GPS signals for navigation. To overcome this challenge, General Dynamics partnered with MIT during the U.S. Navy's biennial Ice Exercise (ICEX 2020) to test the Bluefin-21 Unmanned Underwater Vehicle (UUV) under the ice at the Arctic Circle.
General Dynamics Opens New UUV Manufacturing and Assembly Center of Excellence
August 13, 2021
Company officials and representatives from the U.S. Navy formally opened the Unmanned Undersea Vehicle (UUV) Manufacturing and Assembly Center of Excellence at our Taunton, MA facility. The repurposed manufacturing space will provide manufacturing, assembly, integration and testing capabilities for Knifefish and Bluefin Robotics UUVs.
ICEX 2020: U.S. Navy Deploys Autonomous Bluefin-21 UUV Under The Ice
April 26, 2021
During the U.S. Navy's recent biennial Ice Exercise (ICEX 2020), General Dynamics partnered with MIT to put the Bluefin-21 Macrura UUV to the test under the ice in the Arctic Circle.
Video: Designing Autonomous UUVs For The Future Undersea Battlespace
January 12, 2021
Carlo Zaffanella discusses how General Dynamics engineers are building smarter UUVs for the naval missions of the future. Some of these advancements include connecting UUVs with other vessels using command & control systems, integrating the latest commercial technology and leveraging machine learning.
General Dynamics Demonstrates Cross-domain Command, Control and Communication Technology at ANTX 2018
September 10, 2018
A General Dynamics Mission Systems-led team demonstrated cross-domain, multi-level command, control and communication (C3) capabilities among unmanned underwater vehicles (UUV), submarines and land-based mission operations centers.
General Dynamics Demonstrates Advanced Mission Command and Control among Unmanned Underwater, Airborne and On-shore Assets at ANTX 2017
August 29, 2017
General Dynamics demonstrated multiple mission command, control and communication capabilities connecting Bluefin Robotics’ unmanned underwater vehicles (UUV) and a third-party provided unmanned aerial vehicle (UAV) with a simulated AN/BYG-1 submarine combat control center ashore.
Bluefin UUV Dives Deep into the Arctic at U.S. Navy Exercise
September 16, 2016
MIT students deployed the Bluefin Robotics-built MACRURA Unmanned Undersea Vehicle at the U.S. Navy's Ice Exercise (ICEX 2016), a five-week exercise designed to research, test and evaluate operational capabilities in the Arctic region.


