An animation of the Bluefin-21 Macrura UUV using a new communication and navigation system at ICEX 2020.
When submerged under the ice, underwater vehicles cannot rely on GPS signals for navigation. To overcome this challenge, General Dynamics partnered with MIT during the U.S. Navy's biennial Ice Exercise (ICEX 2020) to test the Bluefin-21® Unmanned Underwater Vehicle (UUV) under the ice at the Arctic Circle.
Using a new integrated acoustic communication system, a Bluefin-21 named Macrura navigated autonomously under a six-foot-thick sheet of ice. This new communication and navigation system was developed by MIT's team at the Laboratory For Autonomous Marine Sensing Systems.

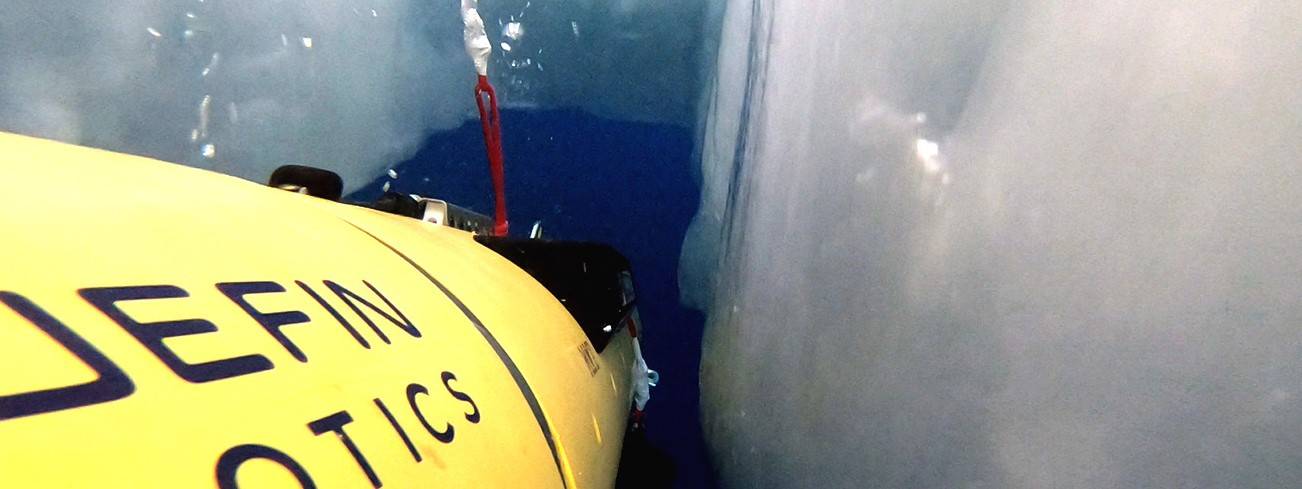
At ICEX 2020, General Dynamics partnered with MIT to demonstrate new navigation technologies by deploying the Bluefin-21 under a six-foot-thick sheet of ice. (Image Credit: General Dynamics Mission Systems)
The team deployed multiple tracking moorings comprised of four small acoustic modems and transducers under the ice. These moorings were connected to surface buoys linked with radios to send data from the Macrura to the central command and control station, ICEBASE, to determine location.
Due to the shifting ice and underwater currents, automatic course corrections are critical in this harsh environment. Utilizing a novel sensor-fusion algorithm constrained by an onboard self-learning dynamic model, Macrura successfully demonstrated the capability of AI based autonomy to adapt in real time and correct its course.

The Bluefin-21 operated autonomously and demonstrated the new integrated acoustic communication and navigation system. (Image Credit: Chief Petty Officer Troy Barnhart, U.S. Navy)
The new communication system maintained 5-10 meters of navigation accuracy despite the harsh under-ice environment. The exercise demonstrated that the Bluefin-21 is capable of operating autonomously and collecting data without the aid of GPS signal coverage. To learn more about our Bluefin-21 UUV, click here.
The General Dynamics and MIT team successfully located and recovered the Bluefin-21 UUV through a "hydro hole" using the new navigation system. (Image Credit: Daniel Goodwin, MIT)



