Bluefin-9 Unmanned Underwater Vehicle (UUV)

MOST POWERFUL SENSOR PACKAGE IN A TWO-MAN PORTABLE UUV
The General Dynamics Mission Systems Bluefin®-9 autonomous unmanned underwater vehicle provides unmatched high-resolution data, leading navigation, data processing and mission turnaround time in a two-man portable UUV. Featuring a full carbon fiber body, a carefully selected and smartly integrated suite of sensors, latest generation communications and navigational components, and new onboard processing capabilities, the Bluefin-9 is the professional’s tool to know what's below.
Standard payloads:
- Side Scan Sonar With Full Swath Bathymetry
- HD Machine Vision Camera
- Sound Velocity Sensor + Temperature + Pressure
- Turbidity
- Fluorometry











Unmatched Data Quality
The Bluefin-9’s integrated Sonardyne Solstice Multi-Aperture Sonar (MAS) provides high-resolution data across the entire 200m swath range.
The Sonardyne Solstice MAS enables operators to view their data in 3D. Bathymetric data and side scan imagery can be viewed in the same instance to produce detailed digital terrain maps.
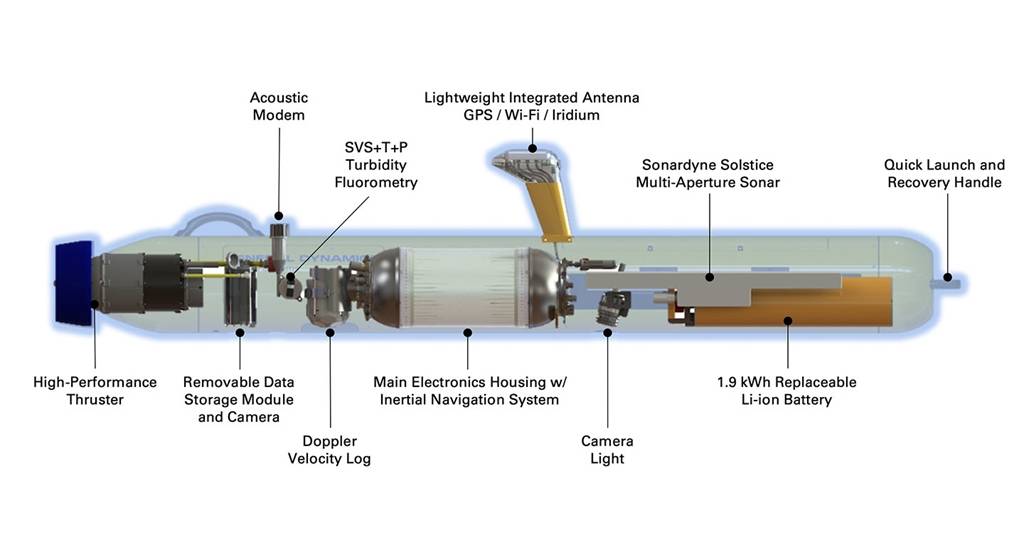
Inside The Bluefin-9
The Bluefin-9’s tightly integrated commercial off-the-shelf sensors deliver best-in-class imagery and collect bathymetric and environmental data, including data on water currents, temperature, salinity and turbidity. Designed for detailed hydrographic surveys, the Bluefin-9 is outfitted with Sonardyne Solstice Multi-Aperture Sonar (MAS) that provides high-resolution imagery even in littoral waters. The Bluefin-9 is also equipped with Nortek Doppler Velocity Logs (DVLs) that collect information on water currents up to 30 meters.
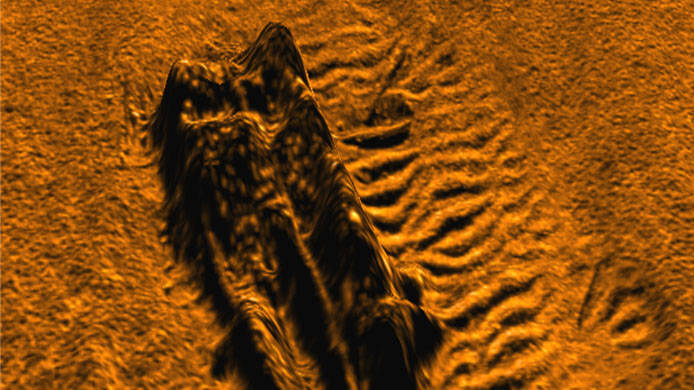
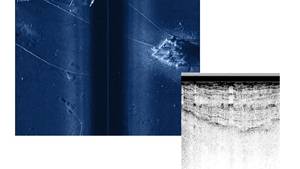
A 3D-image of shipwreck in Boston Harbor captured by a Bluefin-9 UUV.
Sonardyne Solstice Multi-Aperture Sonar (MAS)
Bluefin-9’s integrated Sonardyne Solstice multi-aperture side scan sonar (MAS) delivers a 200 meter swath range and ultra-high along-track resolution of 0.15°. The integrated Sonardyne Solstice MAS delivers high-resolution sonar imagery for hydrographic and bathymetric mapping. Each of the two Solstice arrays has 32 multibeam elements to dynamically focus along the whole length of the swath. High-resolution data across the entire swath results in maximum effective resolution, decreases false-positives and improves operational efficiencies. The Sonardyne Solstice MAS that provides undistorted, high-contrast imagery comparable to Synthetic Aperture Sonar (SAS) in a small, low power (18 W) solution.
Sound Velocity, Water Temperature & Salinity
The integrated Valeport UV-SVP Sound Velocity Sensor provides direct measurement of sound velocity, water temperature and ambient water pressure. These measurements are used in the Post-Mission Analysis (PMA) to compute water salinity and conductivity, using known ocean models.
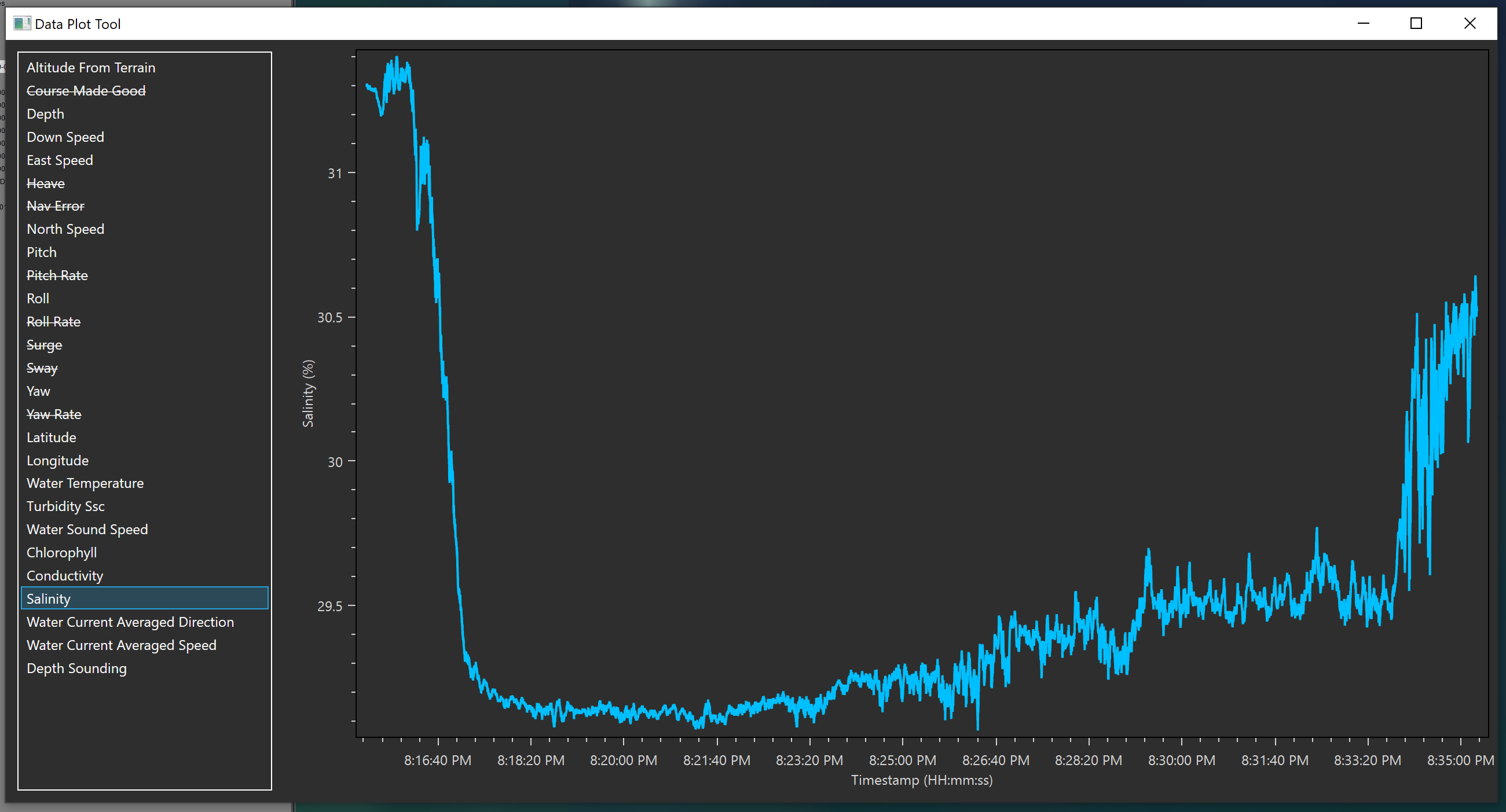
A Salinity Plot example from the Bluefin-9's environmental sensing suite.
Turbidity & Chlorophyll-A Concentration
The integrated Sea-Bird Scientific ECO Pucks (Fluorometer and Turbidity (FLNTU) configuration) measures both chlorophyll-a and water turbidity.
Water Current
The Nortek Doppler Velocity Log (DVL) on the Bluefin-9 is capable of calculating the water current direction and speed near the vehicle, like an Acoustic Doppler Current Profiler (ADCP). The DVL on the Bluefin-9 collects and provides current profiles extending from the vehicle to the seafloor, or to maximum range of the DVL.
Removable 1.9 kWh Lithium-ion Battery
The removable 1.9 kWh Li-ion battery can be easily accessed, removed and replaced in-field in minutes. The battery provides 8 hours of in-water operation, and is fully recharged in 6 hours. The batteries, common across numerous Bluefin UUVs, are also shippable under UN 38.3.

The Bluefin-9's Removable Data Storage Module (RDSM)
1 TB Removable Data Storage Module (RDSM)
The Removable Data Storage Module (RDSM) is a field-swappable module that processes and stores data collected by integrated sonar, camera and environmental sensors. An operator is able to recover and redeploy their vehicle in 30 minutes or less and have reviewable or actionable data in-hand immediately. Bluefin-9’s RDSM acts as an independent data processor, generating and storing post-processed data with a simple interface to an operator’s workstation. The RDSM contains a high-definition, machine-vision-grade monochrome camera that captures still images and video. Imagery is geotagged for easy review during post-mission analysis.
Seafloor Optical Camera
The Seafloor Optical Camera is optimized for low-light operation and captures still images at up to 3.2 megapixels or Full High-definition video. The monochrome camera delivers lower noise and higher overall image quality in a low-light subsea environment. Lighting provided by an LED floodlight can be turned on and off for relevant portions of a mission. All captured images are time-referenced for post-mission processing and analysis.
Location Aids
The vehicles integrate visible LED strobe lights and a radio direction finder (RDF) beacon that aid in recovery of the vehicle when it is on the surface. While the vehicle is underwater, including while it is in the emergency mode, the vehicle’s range can be computed by pinging the acoustic modem.
Status Monitoring
Bluefin-9 monitors its own performance while on mission through the use of environmental sensors inside of the pressure vessels that measure the pressure, humidity and temperature, while also monitoring for leaks, to ensure that problems can be remedied before damage occurs from environmental effects. This information is relayed in real-time to the operator to monitor during the mission.
Features
The redesigned Bluefin®-9 provides unmatched data quality, precise and reliable navigation, and rapid mission turnaround time in a two-man portable autonomous unmanned underwater vehicle.
- Unmatched Data Quality - Bluefin-9’s integrated Sonardyne Solstice multi-aperture side scan sonar delivers a 200 meter swath range and ultra-high along-track resolution of 0.15°.
- Precise & Reliable Navigation -The Bluefin-9 provides precise navigation (0.3% D.T. CEP 50) and accurate, geo-referenced data by incorporating a high-performance Doppler Velocity Log (DVL) and Inertial Navigation System (INS).
- Expeditionary Operations - The Bluefin-9 allows swapping of the 1.9 kWh battery and 1TB Removable Data Storage Module (RDSM) in 30 minutes or less. The modular, free-flooded architecture eases in-field maintenance and minimizes operational down-time.
- Data When You Need It - The Bluefin-9 features advanced on-board data processing that offers operators access to processed sonar and camera data that is ready for post-mission analysis.
- Dedicated Emergency Operations System - The Bluefin-9 is designed with an innovative emergency operations system that provides redundancy to the vehicle’s core functions in the event of a failure. An independently powered low-power microcontroller ensures key communications systems are able to provide locational data and telemetry to an operator to facilitate prompt and safe recovery of the vehicle.
- 12-Month Standard Limited Warranty - Like all Bluefin Robotics solutions, the Bluefin-9 comes with General Dynamics quality, reliability, and support. Our 12-month limited warranty provides additional confidence that the Bluefin-9 is the platform of choice for the toughest and most vital missions.
Applications
Tactical |
Industrial |
Academic |
|
|
|
Specifications
Technical Specifications |
View Datasheet |
| Diameter |
9.375” (23.8 cm) W x 10.375” (26.4 cm) H |
| Length |
95.2” (241.8 cm) |
| Weight |
155 lb. (70 kg) |
| Buoyancy |
Buoyant in fresh and salt water |
| Lift Points |
Nose and Aft mounted carrying handles for two-man lift |
| Depth Rating |
656’ (200 m) |
| Energy |
1.9 kWh rechargeable Li-Ion battery Designed for rapid removal and replacement—recharges in six hours using rugged battery charger |
| Endurance |
8hr @ 3kt |
| Speed | Sustained up to 6 knots |
| Propulsion |
Gimbaled, ducted thruster for propulsion and control |
| Navigation |
Real-time accuracy ≤ 0.3% D.T. CEP 50 GPS (1.0 m CEP 50 accuracy) Dedicated Inertial Navigation System Doppler Velocity Log |
| Integrated Payloads & Sensors |
Sonardyne Solstice 3000 Multi-aperture sonar Removable Data Storage Module (RDSM) w/ Camera Turbidity and Fluorometer Sensor Sound Velocity Sensor + Temperature + Pressure |
| Antenna |
Integrated GPS, Wi-Fi, and Iridium w/ visible strobe |
| Communications |
Ethernet, Wi-Fi, Iridium, Acoustic |
| Safety Systems |
Ground Fault Detection, Leak Detection, Independently Powered Emergency Operations System |
| Software |
Bluefin Dashboard and Bluefin Planner Optional SeeByte SeeTrack v4 interoperability |
Operator Tool Suite
Our Operator Tool Suite is a comprehensive UUV software package that provides the interface between the UUV and the operator for all mission phases. The simple user interface maximizes the operator’s effectiveness in UUV operations. This Windows-based tool suite includes everything necessary to run and manage the system, including vehicle check-out and testing, mission planning, vehicle communications, mission monitoring and execution, data management, and post-mission analysis.
Mission Planner
From within this graphical tool, basic missions are easy to enter and verify, while complex mission plans can be built up from basic survey “widgets.” Mission and safety details are fully accessible, allowing for rapid and accurate mission planning. Planning takes place on top of a chart-based view which accepts raster or digital charts. Operators can specify safety settings, operational constraints, recovery points and return plans. The Mission Planner also allows customer-specific commands to be sent via the Standard Payload Interface.
The Bluefin-9 fully supports SeeByte’s SeeTrack 4, which allows the user to graphically plan missions on nautical charts and specify operational and safety limits, recovery points and return plans. SeeTrack can display previously collected mission data that allows the user to plan the next mission with full situational awareness. External data sources can easily be imported from a variety of standard formats, including DNC, ENC S-57, ENC S-63, ESRI ShapeFiles and GeoTiff. Additional third-party mission management software can be integrated across the family of Bluefin UUVs.
Dashboard

Dashboard tools enable the operator to track vehicles against a chart-based interface which includes ship position indicators, mission plans, and a variety of operator-specified annotations. Vehicle status is readily apparent, including the current behavior as well as details of vehicle status. The Dashboard automatically shifts communications to the highest bandwidth channel available providing you with a dynamic gateway to the vehicle. A variety of specialized diagnostic interfaces aid the preventative and corrective maintenance procedures for each sensor and subsystem.
TOPICS
Communications Infrastructure
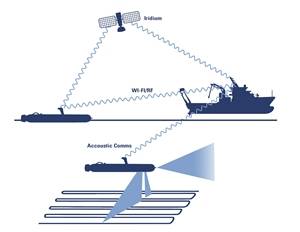
- Iridium over-the-horizon communications
- Acoustic communications while on the surface
Bluefin TOPICS reports detailed mission status while on a dive, including the status of the vehicle’s subsystems, payload health and data collected. Vehicle position is also plotted on the Bluefin Dashboard chart.
Witness
Witness is an end-to-end solution for transferring clips of imagery to operators via Bluefin TOPICS while underwater and underway. Bluefin Witness allows operators to:
- Verify payload data quality
- Identify objects of interest while underway
- Better inform decision making
Bluefin Witness processes payload data in real time onboard the UUV, compresses the imagery and sends it to operators via the acoustic communication link throughout a mission.
Training & Support
General Dynamics Mission Systems offers comprehensive training that consists of classroom and hands-on instruction for operating and maintaining the system. Training typically ranges between 5–10 days and takes place at our Quincy, MA, UUV facility.
Training material is provided for each student. Extended, on-site and custom training courses are also available. General Dynamics Mission Systems can also run “train-the-trainer” courses, which enable customers to train their own personnel.
Support options include technical support services via email or telephone, and on-site support engineering services at negotiated day-rates. Custom service agreements are available, and can include extended warranty coverage, 24/7 support, defined response periods or global on-site marine operations support.



