Bluefin HAUV

Hovering Autonomous Underwater Vehicle
HAUV is a two-man-portable hovering AUV designed for ship hull inspection. Equipped with a high-resolution imaging sonar, it surveys ship hulls and other structures with minimal prior knowledge. While surveys are executed autonomously, the operator can manually control the vehicle to further observe features of interest identified in the real-time data. Applications for the HAUV include:
- Ship Hull and Infrastructure Inspection
- Port and Harbor Security
- Mine Countermeasures (MCM)
- Unexploded Ordnance (UXO)
- Scientific Research




Features
CONTACT RELOCATION
HAUV can autonomously locate and relocate contacts on a ship’s hull with a precision of better than 2 meters CEP 50.
EASE OF OPERATION
The system can be unpacked, checked out and launched from a small boat or pier in less than 30 minutes, and the field-swappable battery and removable data storage module enable rapid turnaround between missions. An intuitive mission planning tool enables dives to be planned in a matter of seconds, and data retrieval and reporting occur automatically.
HIGH-QUALITY DATA
The integrated DIDSON™ sonar provides high-resolution sonar images that can be viewed in real time over the vehicle’s fiber optic tether. Data can also be post-processed into near-photo-quality images or mosaics using third-party software.
PRECISE MANEUVERABILITY
HAUV uses thrusters to hover, rotate in place and translate in any direction, enabling operations in confined areas. A fiber optic tether allows remote manual control of the vehicle for added maneuverability.
Literature
| Dimensions | 52.5 x 36.75 x 15 in (133 x 93 x 38 cm) |
| Weight (Dry) | 166.5 lb (72.6 kg) |
| Buoyancy | 1 to 2 lb (500 g to 1 kg) net positive |
| Lift Points | 4 handles for two-man portability |
| Depth Rating | 100 ft (30 m), 200 ft (60 m) (optional) |
| Endurance | Up to 3.5 hours with standard payload (no current) |
| Speed | Up to 0.5 knots (1.5 knots optional) |
| Energy | 1.5 kWh of total energy One 1.5 kWh battery pack Lithium-polymer, pressure-tolerant |
| Propulsion | Five thrusters for propulsion and control |
| Navigation | Contact location / relocation; 2 m CEP 50, 1 m CEP 50 (optional) IMU, DVL and depth sensor Hull-relative or seafloor-relative navigation |
| Communications | Real-time Ethernet via tether (fiber optic tether optional); Ethernet via shore power cable |
| Safety Systems | Emergency location transponder (optional) |
| Software | GUI-based Operator Tool Suite Third-party mosaicing software (optional) |
| Data Management | 4 GB removable data storage module (RDSM) |
| Standard Payload | Sound Metrics ARIS Explorer 3000 Imaging Sonar (1.8 MHz, 3.0 MHz) |
Operator Tool Suite
Our Operator Tool Suite is a comprehensive AUV software package that provides the interface between the AUV and the operator for all mission phases. The simple user interface maximizes the operator’s effectiveness in AUV operations. This Windows-based tool suite includes everything necessary to run and manage the system, including vehicle check-out and testing, mission planning, vehicle communications, mission monitoring and execution, data management, and post-mission analysis.
Mission Planner
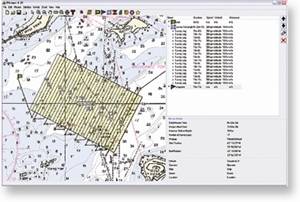
From within this graphical tool, basic missions are easy to enter and verify, while complex mission plans can be built up from basic survey “widgets.” Mission and safety details are fully accessible, allowing for rapid and accurate mission planning. Planning takes place on top of a chart-based view which accepts raster or digital charts. Operators can specify safety settings, operational constraints, recovery points and return plans. The Mission Planner also allows customer-specific commands to be sent via the Standard Payload Interface.
Dashboard
Vehicle Testing, Checkout and Mission Monitoring
Dashboard tools enable the operator to track vehicles against a chart-based interface which includes ship position indicators, mission plans, and a variety of operator-specified annotations. Vehicle status is readily apparent, including the current behavior as well as details of vehicle status. The Dashboard automatically shifts communications to the highest bandwidth channel available providing you with a dynamic gateway to the vehicle. A variety of specialized diagnostic interfaces aid the preventative and corrective maintenance procedures for each sensor and subsystem.



