Bluefin-12 Unmanned Underwater Vehicle (UUV)

Advanced, Mission-Ready and Modular Medium-Class UUV
The General Dynamics Bluefin®-12 is a lightweight medium-class unmanned underwater vehicle (UUV) designed to deliver mission critical data and complete high-consequence and changing missions.
The Bluefin-12 base model comes with an open and flexible payload bay, providing more than 4,000 cm3 of payload volume to allow rapid integration of mission specific payloads. This UUV can also be configured as a turnkey system delivering integrated survey capabilities including high-resolution sonar, environmental sensing, powerful on-board data processing and highly accurate navigation. Built with robust core capabilities, increased modularity, embedded intelligence, data processing, and extended operational range, the Bluefin-12 is ready for today’s mission and prepared for tomorrow’s threats.
The optional Integrated Survey Package comes with:
- Sonardyne's Solstice Multi-Aperture Sonar and AVTRAK 6
- HD Machine-Vision-Grade Camera and Illumination
- Sea-Bird Scientific ECO Puck
- Removable Data Storage Modular (RDSM)
- Forward Looking Sonar









Ready For Today's Mission,
Prepared For Tomorrow's Threats
The Bluefin-12 UUV's advanced capabilities enable safe operation in unpredictable environments.
- Real-time navigational accuracy ≤ 0.1 D.T. CEP 50
- Optional integrated forward-looking sonar enables accurate and reliable terrain following and collision avoidance
- Optional automatic target recognition
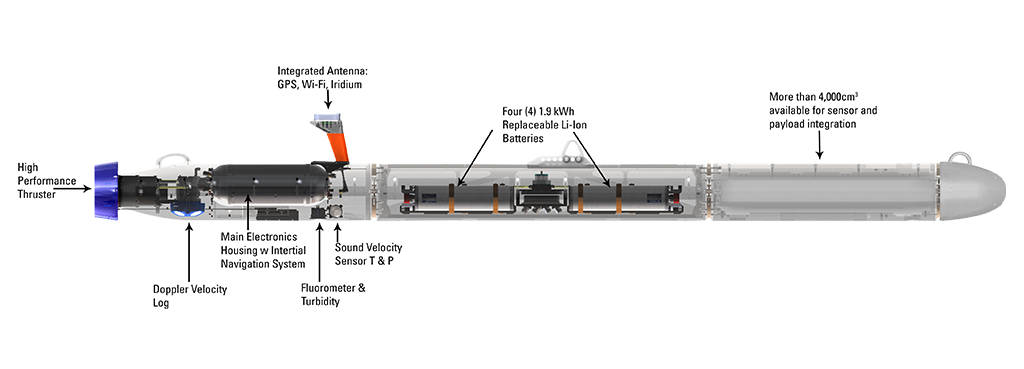
Inside The Bluefin-12 Base Model
The base model Bluefin-12 is a modular, extendible UUV able to accommodate the integration of operator designated sensors and payloads. The Bluefin Robotics® Standard Payload Interfaces, open-architecture compatibility and more than 4,000 cm3 payload section supports the rapid integration of sensors and payload needed for the successful completion of new missions.
The Bluefin-12 base model also includes intelligent core capabilities including wi-fi and iridium communications, an integrated environmental sensor suite, highly accurate navigation (≤ 0.1% D.T. (CEP50), swappable rechargeable batteries, and rapid-mission turnaround times enabling up-tempo operations.

User/Mission Based Payload and Sensor Integration Services
General Dynamics Mission Systems and Bluefin Robotics have integrated and supported more than 100 sensors and payloads across the Bluefin Robotics UUV family.
Contact Us For More Information on Payload & Sensor Integration Services
Bluefin-12 With Optional Integrated Survey Package
The Bluefin-12 UUV with the Optional Integrated Survey Package includes the base model vehicle's core capabilities and adds select integrations including the Sonardyne Solstice Multi-Aperture Sonar, forward looking sonar, 1TB removable data storage module (RDSM), high-definition machine-vision camera, on-board data processing, and integrated Acoustic Communications. The Bluefin-12 with integrated Survey Package provides an advanced, modular, long-endurance, high-fidelity sonar survey vehicle able to maintain up-tempo operations or extend missions beyond the horizon.
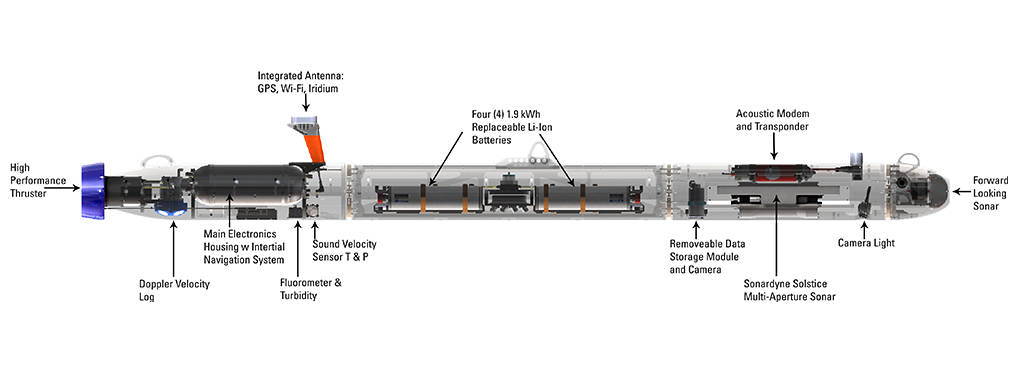

The Bluefin-12’s integrated survey package includes:
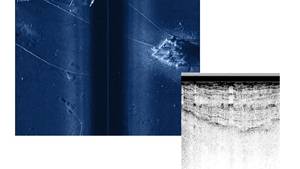
Sonardyne Solstice Multi-Aperture Sonar (MAS) with Full Swath Bathymetry
Designed for detailed hydrographic surveys, the Solstice MAS provides high-resolution imagery even in shallow, littoral waters. Sonardyne Solstice MAS delivers a 200 meter swath range and ultra-high, along-track resolution of 0.15°. Solstice delivers undistorted, high-contrast imagery in shallow water, where other sensors fail, by using dynamic focusing while also allowing for wide swath coverage.
On-Board Data Processing: 1TB Removable Data Storage Module (RDSM) with Camera
Bluefin-12’s new RDSM acts as an independent data processor, generating, storing and delivering processed data. Operators are able to view data and conduct their post mission analysis at mission completion by directly connecting to the RDSM through a simple interface. The RDSM contains a high-definition, machine vision-grade monochrome camera that captures still images and video. Imagery is geotagged for easy review during post-mission analysis.
Terrain Following/Collision Avoidance
Bluefin-12 can integrate Forward Looking Sonar (FLS) to enable autonomous terrain following and collision avoidance, ensuring mission completion and delivery of actionable data to the operator.
Acoustic Communications: Sonardyne AVTRAK 6
HD Machine-Vision-Grade Camera and Illumination
Sea-Bird Scientific ECO Puck
Automatic Target Recognition (Optional)
Features
The Bluefin-12 UUV, equipped with a suite of core sensors, embedded intelligent capabilities, and powerful on-board data processing is the user-friendly modular UUV for mission integration and expansion for defense, commercial and academic unmanned underwater missions and applications.
Precise & Reliable Navigation
The Bluefin-12 delivers reliable and accurate navigation (≤0.1% D.T. CEP 50) by incorporating and coupling a high-performance Doppler Velocity Log (DVL) and Inertial Navigation System (INS). The Bluefin-12 integrates advanced navigation components to achieve superior vehicle performance and locational accuracy while underway. A dedicated inertial navigation system and Doppler Velocity Log are paired with a powerful global positioning system receiver and ultra-precise system clock to ensure surveys are performed as planned and the collected data is always reliably georeferenced.
Dedicated Emergency Operations System
The Bluefin-12 is designed with an innovative emergency operations system that provides redundancy to the vehicle’s core functions in the event of a failure. An independently powered low-power microcontroller ensures key communications systems are able to provide locational data and telemetry to an operator to facilitate prompt and safe recovery of the vehicle.
Rapid Turnaround
The Bluefin-12 UUV allows for the rapid removal and replacement of the four (4) Li-Ion 1.9 kWh batteries, and the RDSM. The modular, free-flooded architecture eases in-field maintenance and minimizes operational down-time. The Bluefin-12 can be recovered, refitted and redeployed within 30 minutes by experienced operators. The Bluefin-12 is a lightweight, medium-class UUV and weighs 550 lb (250 kg) and can be launched and recovered from numerous vessels of opportunity.
Low Total Cost of Ownership and Low Logistics Footprint
The Bluefin-12’s modular vehicle construction enables simplified in-field mission preparation and maintenance, and rapid worldwide shipment.
- Four (4) discrete and free-flooded vehicle sections provide easily accessed, maintained or replaced subassemblies for efficient in-field mission preparation, maintenance and refitting for continuous and extended missions.
- Shared sub-assemblies and spares drive efficiencies across the entire Bluefin Robotics UUV family, decreasing costs delivery schedules, and increasing ease of operational maintenance throughout the total UUV life cycle.
- All Bluefin Robotics UUVS share the common Bluefin Mission Planner and Dashboard interfaces.
- Once trained, Bluefin Robotics UUV operators gain immediate expertise in mission planning and mission execution across the family of Bluefin Robotics UUVs.
Applications
Tactical |
Industrial |
Academic |
|
|
|
Specifications
Technical Specifications |
View Datasheet |
| Diameter |
12.8” (32 cm) |
| Length |
15.8’ (4.83m) |
| Weight |
550 lb (250 kg) – with integrated survey package |
| Buoyancy |
Buoyant in Fresh and Salt Water Seamless Transition Between Water Bodies |
| Lift Points |
Nose, Mid-section, Aft Mounted Lift-Points |
| Depth Rating |
656’ (200 m) |
| Energy |
Four (4) 1.9 kWh rechargeable Li-Ion battery Designed for rapid removal and replacement—recharges in six hours using rugged battery charger |
| Endurance |
24 hr @ 3 kt |
| Speed | Sustained up to 6 knots |
| Propulsion |
Gimbaled, ducted thruster for propulsion and control |
| Navigation |
Real-time accuracy ≤ 0.1% D.T. CEP 50 GPS (1.0 m CEP 50 accuracy) Dedicated Inertial Navigation System Doppler Velocity Log |
| Available Integrated Payloads & Sensors |
Sonardyne Solstice 3000 Multi-aperture sonar Removable Data Storage Module (RDSM) w/ Camera Turbidity and Fluorometer Sensor Sound Velocity Sensor + Temperature + Pressure |
| Antenna |
Integrated GPS, Wi-Fi, and Iridium w/ visible strobe |
| Communications |
Ethernet, Wi-Fi, Iridium, Acoustic |
| Safety Systems |
Ground Fault Detection, Leak Detection, Independently Powered Emergency Operations System |
| Software |
Bluefin Dashboard and Bluefin Planner Optional SeeByte SeeTrack v4 interoperability |
Operator Tool Suite
Our Operator Tool Suite is a comprehensive UUV software package that provides the interface between the UUV and the operator for all mission phases. The simple user interface maximizes the operator’s effectiveness in UUV operations. This Windows-based tool suite includes everything necessary to run and manage the system, including vehicle check-out and testing, mission planning, vehicle communications, mission monitoring and execution, data management, and post-mission analysis.
Mission Planner
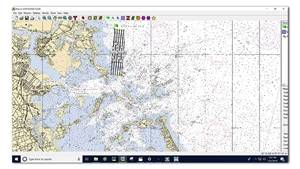
From within this graphical tool, basic missions are easy to enter and verify, while complex mission plans can be built up from basic survey “widgets.” Mission and safety details are fully accessible, allowing for rapid and accurate mission planning. Planning takes place on top of a chart-based view which accepts raster or digital charts. Operators can specify safety settings, operational constraints, recovery points and return plans. The Mission Planner also allows customer-specific commands to be sent via the Standard Payload Interface.
The Bluefin-9 fully supports SeeByte’s SeeTrack 4, which allows the user to graphically plan missions on nautical charts and specify operational and safety limits, recovery points and return plans. SeeTrack can display previously collected mission data that allows the user to plan the next mission with full situational awareness. External data sources can easily be imported from a variety of standard formats, including DNC, ENC S-57, ENC S-63, ESRI ShapeFiles and GeoTiff. Additional third-party mission management software can be integrated across the family of Bluefin UUVs.
Dashboard

Dashboard tools enable the operator to track vehicles against a chart-based interface which includes ship position indicators, mission plans, and a variety of operator-specified annotations. Vehicle status is readily apparent, including the current behavior as well as details of vehicle status. The Dashboard automatically shifts communications to the highest bandwidth channel available providing you with a dynamic gateway to the vehicle. A variety of specialized diagnostic interfaces aid the preventative and corrective maintenance procedures for each sensor and subsystem.
TOPICS
Communications Infrastructure
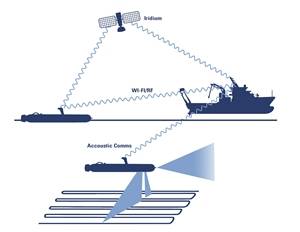
- Iridium over-the-horizon communications
- Acoustic communications while on the surface
Bluefin TOPICS reports detailed mission status while on a dive, including the status of the vehicle’s subsystems, payload health and data collected. Vehicle position is also plotted on the Bluefin Dashboard chart.
Witness
Witness is an end-to-end solution for transferring clips of imagery to operators via Bluefin TOPICS while underwater and underway. Bluefin Witness allows operators to:
- Verify payload data quality
- Identify objects of interest while underway
- Better inform decision making
Bluefin Witness processes payload data in real time onboard the UUV, compresses the imagery and sends it to operators via the acoustic communication link throughout a mission.
Training & Support
General Dynamics Mission Systems offers comprehensive training that consists of classroom and hands-on instruction for operating and maintaining the system. Training typically ranges between 5–10 days and takes place at our Quincy, MA, UUV facility.
Training material is provided for each student. Extended, on-site and custom training courses are also available. General Dynamics Mission Systems can also run “train-the-trainer” courses, which enable customers to train their own personnel.
Support options include technical support services via email or telephone, and on-site support engineering services at negotiated day-rates. Custom service agreements are available, and can include extended warranty coverage, 24/7 support, defined response periods or global on-site marine operations support.


